Mehr Information
Hauptautor
Peter Vertaľ
Co-Autoren
Gustáv Kasanicky, Tibor Kubjatko, Hermann Steffan
Medientyp
PDF-Dokument
Publikationsart
Vortrag
Erscheinungsjahr
2016
Verlag
25. EVU Congress, Bratislava
Literaturstelle
-
 Die fachliche Expertenkommunität aus dem Bereich der Verkehrsunfälle hat nicht genügende Informationen über allgemeine Reaktion der autonomen Bremssysteme. Es ist reales Testen verschiedener Systemen notwendig. Für die Testzwecke wurden aus der Datenbank Zedat achtzehn Fälle aus dem realen Leben ausgewählt, bei denen zum Zusammenstoß aus der Frontseite in den Fußgänger kam. Einzelne Fälle wurden simuliert, um ausführliche Modelsituation fürs Testen zu gewinnen. Die Unfallsimulationen wurden im Programm PC Crash 10.0 mit der Verwendung von Mehrkörper und Gittermodel der Fahrzeuge realisiert. Der Artikel ist die Fortsetzung der Studie, die sich mit dem Testen und Forschen der Aktivierung der Assistenzsysteme (ADAS) in den Personenkraftwagen befasst. Sie schließt sich auf den Artikel Vertal P. EVU 2015 [1] an.
Die fachliche Expertenkommunität aus dem Bereich der Verkehrsunfälle hat nicht genügende Informationen über allgemeine Reaktion der autonomen Bremssysteme. Es ist reales Testen verschiedener Systemen notwendig. Für die Testzwecke wurden aus der Datenbank Zedat achtzehn Fälle aus dem realen Leben ausgewählt, bei denen zum Zusammenstoß aus der Frontseite in den Fußgänger kam. Einzelne Fälle wurden simuliert, um ausführliche Modelsituation fürs Testen zu gewinnen. Die Unfallsimulationen wurden im Programm PC Crash 10.0 mit der Verwendung von Mehrkörper und Gittermodel der Fahrzeuge realisiert. Der Artikel ist die Fortsetzung der Studie, die sich mit dem Testen und Forschen der Aktivierung der Assistenzsysteme (ADAS) in den Personenkraftwagen befasst. Sie schließt sich auf den Artikel Vertal P. EVU 2015 [1] an.
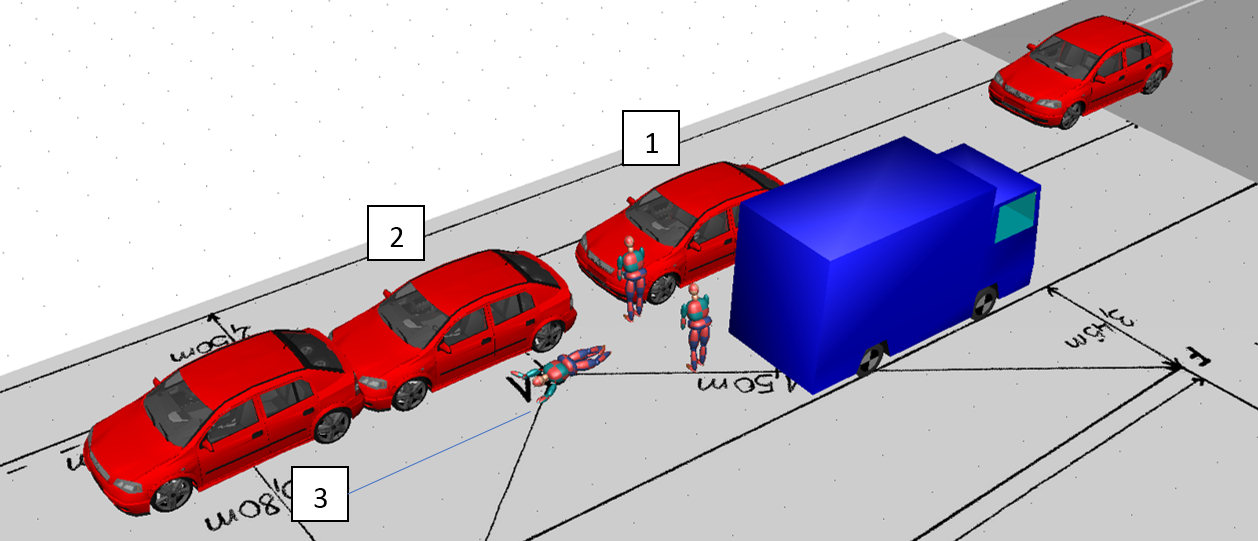
Die ausgewählten Testszenarien basierten auf den simulierten Unfällen des neuen Subaru Outback 2016 und Volvo V40CC. Der grundlegende Unterschied zwischen Volvo und Subaru bilden die Hardwareeinstellungen. Volvo nutzt das System für die Fußgängerdetektion, bestehend aus Monokamera + Radar + Lidar aus. Subaru nutzt im Rahmen des Systems für die Detektion der Fußgänger nur Stereokameras aus. Die Dummybewegung des Fußgängers wurde mit ultraschmalen (oder ultrageraden) Roboter (UFO) angetrieben, den man durchfahren kann und den die Gesellschaft DSD hergestellt hat. UFO wurde für experimentelles Testen ADAS entwickelt und mit der Fahrzeugbewegung mithilfe von D-GPS synchronisiert. Vor dem Testprozess wurde der Dummy in dem reflexionsarmen Raum ausgewertet, damit notwendige Merkmale über die Fähigkeit der Radarreflexion ermittelt werden, die gleich wie bei dem menschlichen Körper sein sollen. Diese Arbeit orientiert sich auf den Vergleich der Aktivierungsbedingungen des Detektionssystems der Fußgänger im neuen Subaru Outback und Volvo V40CC. Aus der Expertenansicht auf die Verkehrsunfälle orientiert sich die Studie auf nachfolgende Probleme:
- Bei welcher Geschwindigkeit kann das System die Unfallgefahr reduzieren oder vermeiden?
- Was für eine Art der Fußgängerbewegung kann das System identifizieren?
- Im welchen Zeitintervall vor dem Zusammenstoß warnt das System den Fahrer?
- Wie hoch ist die Verzögerung des Fahrzeugs bei der autonomen Bremsung?
- Kann man Daten über CDR/EDR (Datenermittlung über Verkehrsunfall/Datenermittlung über das Ereignis) aus dem Speicher nach der Manipulation mit dem System gewinnen?
(EVU-Mitglieder können den ganzen Beitrag herunterladen)