Mehr Information
Hauptautor
Favere, S.
Co-Autoren
Schmidt-Cotta, R.-R.
Medientyp
PDF-Dokument
Publikationsart
Vortrag
Erscheinungsjahr
2013
Verlag
22. EVU Conference, Florence
Literaturstelle
Favere, S.: TACOT Project, toward a Trusted GNSS function
 Die Notwendigkeit einer robusten und verläßlichen Versorgung mit GNSS-Informationen wächst seit vielen Jahren ständig und zwar weit über die üblichen Sicherheitsanwendungen (Safetyoflifedomains) hinaus. Wenn es heutzutage überhaupt einige wenige technische Lösungen in dieser Hinsicht gibt, sind sie zu komplex und für die meisten Anwendungen zu teuer.
Die Notwendigkeit einer robusten und verläßlichen Versorgung mit GNSS-Informationen wächst seit vielen Jahren ständig und zwar weit über die üblichen Sicherheitsanwendungen (Safetyoflifedomains) hinaus. Wenn es heutzutage überhaupt einige wenige technische Lösungen in dieser Hinsicht gibt, sind sie zu komplex und für die meisten Anwendungen zu teuer.
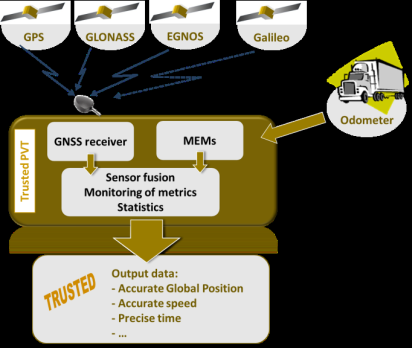
TACOT bietet da eine neuartige technische Alternative, die mit einem hohen Grad an Zuverlässigkeit und Robustheit und zu niedrigen Kosten Position, Geschwindigkeit und Zeit (engl.: PVT) angibt. Die vorgeschlagene Lösung (Verläßliche PVT-Funktion) beruht wesentlich auf der Zusammenführung und der Zusammensetzung verschiedener Informationsquellen zwecks Gewährleistung eines hohen Verläßlichkeitsniveaus. Das neue Konzept beruht namentlich auf der Bayes’schen Technik und ist besonders schwer zu umgehen.
Diese Lösung zieht Nutzen auch aus der Vielfalt von GNSS-Konstellationen und von EGNOS, um die Qualitätder Ergebnisse zu erhöhen. Auf diese Weise bereitet TACOT auch den Markt für die Galileo-Einführung.
Der TACOT-Ansatz ist, die wesentlichen Merkmale dieser Innovation durch eine Verbesserung der Digitalen Tachographen aufzuzeigen (hier genannt: Augmented Digital Tachograph oder ADT) und zwar in Vorwegnahme einer angedachten Änderung der EU-Verordnung 3821/85. Die erwartete Verbesserung besteht also in der Lieferung einmal einer zweiten Bewegungsinformation und zum anderen der GNSS-Position für den Beginn und das Ende der Reisen in einer verläßlichen und sicheren Weise an den ADT. TACOT ist weiter in der Lage die Nutzung der verläßlichen PGZDaten durch beliebige ITS-Anwendungen seitens Dritter zu unterstützen. Zu TACOT gehört daher die Festlegung und die Integration einer externen Schnittstelle zur Programmierung von Anwendungen (ApplicationProgramming Interface, API) in den ADT sowie auch diese Daten auf dem CAN-Bus zur Verfügung zu stellen.
Zur kompletten Demonstration der TACOT-Errungenschaften werden die in dem Projekt entwickelten Prototypen ihre Daten an ein kommerzielles Flotten-Management System (FMS) übermitteln. Diese Demonstration wird besonders die GNSS-Fortschritte (Genauigkeit, Verfügbarkeit …) hervorheben, den Gewinn an Verläßlichkeit in Bezug auf die möglichen Bedrohungen und Schwächen von GNSS und die vom ADT und den FMS genutzten Daten.