Mehr Information
Hauptautor
Uwe Fürbeth
Co-Autoren
Armin Kast
Medientyp
PDF-Dokument
Publikationsart
Vortrag
Erscheinungsjahr
2018
Verlag
27. EVU Conference, Dubrovnik
Literaturstelle
-

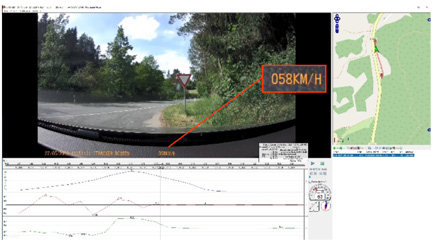
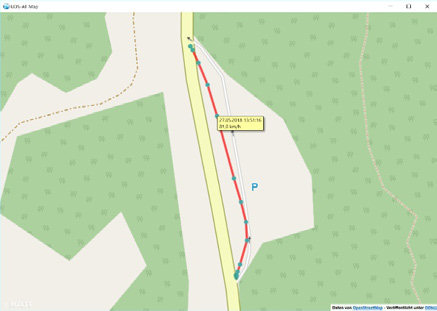
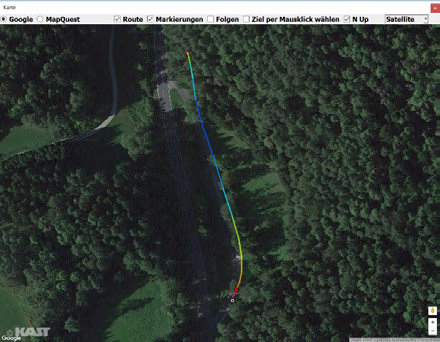
Der UDS-AT bietet die Möglichkeit, fahrzeugeigene Signale direkt vom CAN-Bus oder via CiA447-Schnittstelle abzugreifen und somit beispielsweise den fahrzeuginternen Geschwindigkeitswert direkt als Zahlenwert zu speichern. Zudem besteht die Option ein pulsbasiertes Signal und zusätzlich ein externes GPS-Signal in das Messgerät einzuspeisen. Die gegenüber dem Vorgängermodell verbesserte Beschleunigungssensorik des UDS lässt sich mit einer erhöhten Frequenz von bis zu 1000 Hz speichern und steht somit als hochgenauer Referenzkanal zur Verfügung. Damit eröffnen sich Optionen, das fahrzeugeigene Geschwindigkeitssignal über das IVN (In- Vehicle Network) sowie ein beliebiges GPS-Geschwindigkeitssignal, was beispielsweise auch von einer sogenannten Dashcam kommen kann, im Detail zu analysieren. Im Vergleich zu einer Referenzgeschwindigkeit, die per Integration aus dem Beschleunigungszeitverlauf gewonnen wird, kann der zeitliche Versatz beispielsweise zur GPS-Geschwindigkeit quantifiziert werden. Im Ingenieurbüro Kast wurden von den Autoren hierzu verschiedene Fahrversuche mit der genannten Messtechnik vorgenommen und die aufgezeichneten Daten entsprechend analysiert. Die Ergebnisse zeigen, dass insbesondere GPS basierte Geschwindigkeitsinformationen regelmäßig einen ganz erheblichen zeitlichen Verzug aufweisen. Aber auch der fahrzeuginterne Geschwindigkeitswert weicht teilweise signifikant von den Echtzeitdaten ab. Der Beitrag zeigt die Differenzen der verschiedenen Aufzeichnungsarten auf und gibt damit Hinweise, die bei der Auswertung von GPS-Signalen und Werten aus fahrzeugfesten Steuergeräten zu beachten sind.
(EVU-Mitglieder können den ganzen Beitrag herunterladen)